欧姆龙追求人与机器的协同作业,实现了生产的高度自动化,也让我们看到了可靠、安全,且高效生产的未来工厂。
 图片来源于网络
图片来源于网络
在当今社会,随着市场竞争的加剧,企业所处的市场环境发生了深刻的变革,企业竞争越来越强调基于客户需求的竞争。因此,企业的生产方式逐渐转向以柔性自动化生产为基础的各种先进生产模式,目前生产类型大致可以划分为三种:大量流水生产、多品种小批量生产和单件生产。当下中国制造业多集中在多品种小批量生产企业,这种生产方式开始占有越来越重要的地位。
多品种小品量的生产模式对于产线的需求变动的适应性,以及设备品质都有很高的要求。
欧姆龙拥有齐全的机器人产品线,能够通过先进的技术与高性能的产品,提供顺应社会发展的一体化解决方案。
 图片来源于网络
图片来源于网络
一个驱控一体集成,并能高速装抓放应用的并联机器人Quattro,正在使用吸盘从桌子上拿起附件并将其放入包装中。
 图片来源于网络
图片来源于网络
接着,协作机器人TM登场了,其安全性和可移动性,及其内置视觉软件和相机特性,确保此机器人可实现快速启动和应用场景迅速转换。
协作机器人TM将一个打包好的笔记本电脑盒子放在一堆盒子的顶部,这些盒子位于一个顶部是传送带的LD移动机器人的顶部。
 图片来源于网络
图片来源于网络
*后再由移动机器人LD系列按规划路线,将物品送至孩子们的手中。
 图片来源于网络
图片来源于网络
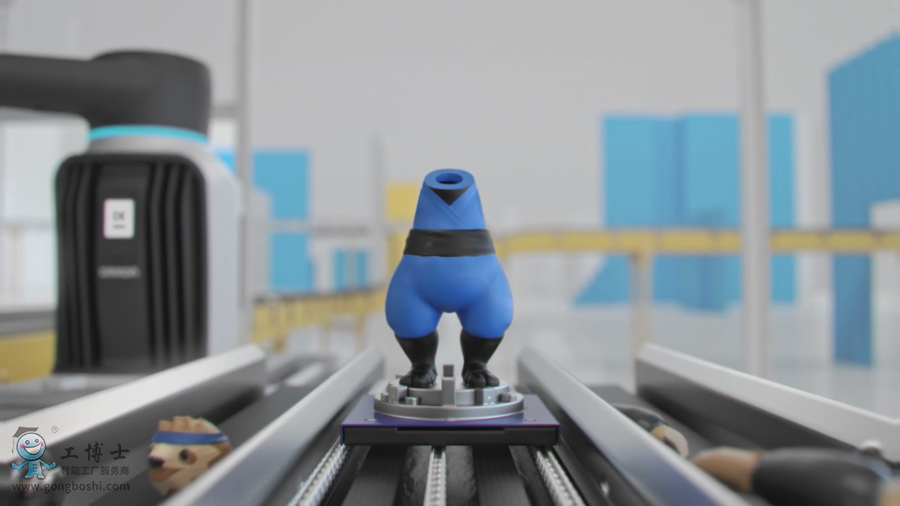
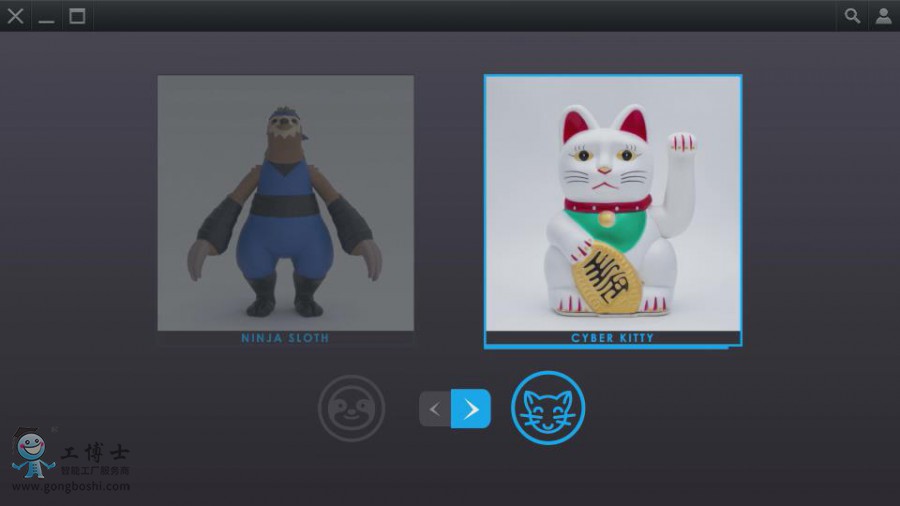
可孩子们并不满足于此,弟弟渴望再得到一个忍者树懒玩偶,而姐姐想要招财猫玩偶,于是欧姆龙的自动化产线,又开始了高速的运行,无需复杂的编程修改,便迅速切换了生产模式。
 图片来源于网络
图片来源于网络
高性能四轴SCARA机器人 I4,开始将部件放置在另一条传送带上。它们井然有序地排列着,并确保不同的部件分类进入车道式分隔器。
 图片来源于网络
图片来源于网络
图片来源于网络
部件被夹具固定在传送带上,通过六轴关节型机器人Viper将其组装起来。
 图片来源于网络
图片来源于网络
当一个忍者树懒玩偶制作完成时,通过触摸屏的简单操作,招财猫的产线又准备完毕。
 图片来源于网络
图片来源于网络
只需简单操作即可切换生产模式。
 图片来源于网络
图片来源于网络
六轴关节型机器人的钳子会变宽以适应不同部件的形状。
 图片来源于网络
图片来源于网络
招财猫的身体和手臂开始向下滚动至**条传送带。
 图片来源于网络
图片来源于网络
I4 SCARA机器人将招财猫零件放到下一条传送带上。它们被分为手臂和身体。
 图片来源于网络
图片来源于网络
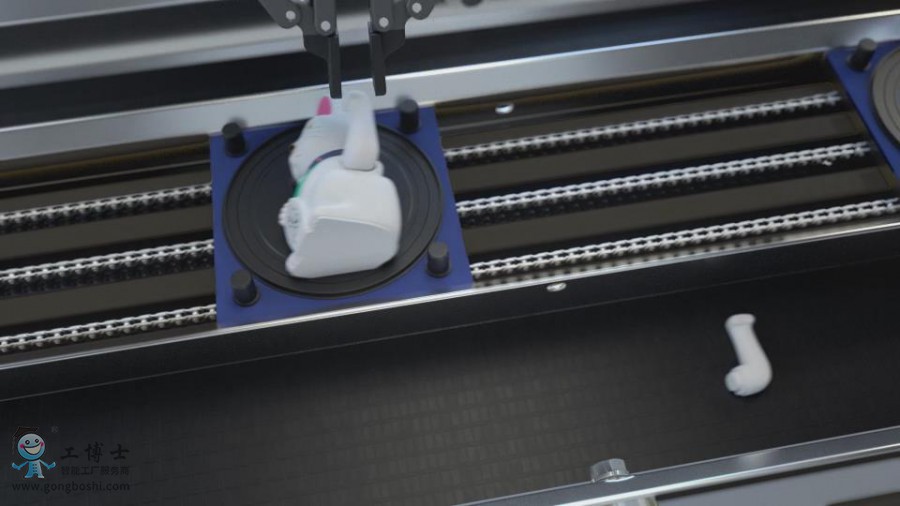
六轴关节型机器人Viper,再对对招财猫的手臂进行分拣并安放在每一只招财猫身上。
 图片来源于网络
图片来源于网络
图片来源于网络
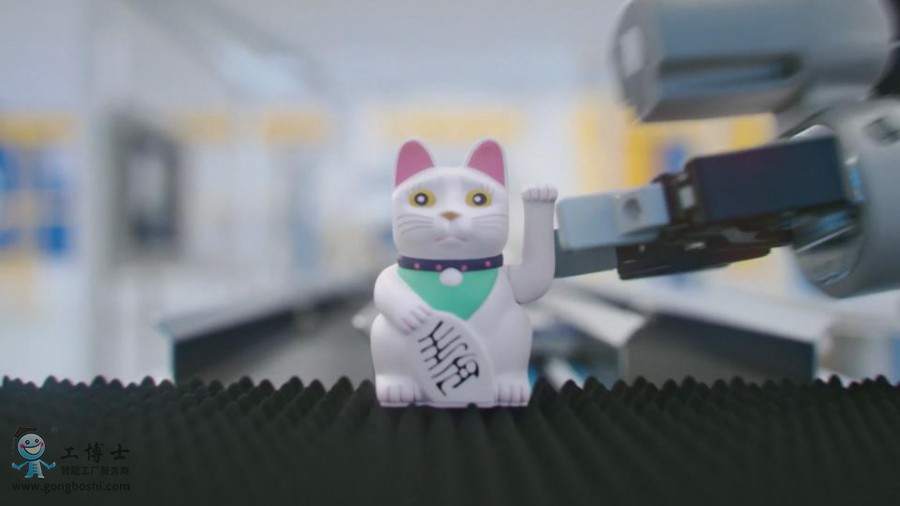
至此,孩子们想要的一切就如此轻而易举的完成了!
 图片来源于网络
图片来源于网络
欧姆龙的种类丰富的机器人产品可灵活对应各种生产需求,与您一同打造可靠、安全,且高效生产的未来工厂!
以太网功能通过机器自动化控制器NJ/NX/NY系列熟悉的编程语言(IEC 61131-3)控制机器人
嵌入式驱动控制,可减少电缆数量
高达1.4 m/s的传送带跟踪速度
采用高载荷能力设计,支持各种抓手(多个抓取)
支持在传送带上快速抓取与放置
有效降低安装成本和机器人振动
***大工作直径1,130 mm
工作高度425 mm
***大有效载荷8 kg
重量52 kg
| 类型 |
Hornet |
Hornet扩展选项 |
| IP |
Standard |
IP65/67 |
Standard |
IP65/67 |
| Hornet 565 3轴 |
17201-45600 |
17201-45610 |
17203-45600 |
17203-45610 |
| Hornet 565 4轴 |
17201-45604 |
17201-45614 |
17203-45604 |
17203-45614 |
| 系统构成 |
机器人 + eAIB,嵌入式驱动控制∗ |
机器人 + eAIB所需连接电缆 |
| 用途 |
通常用于单台机器人系统 |
通常用于多台机器人系统,
需与现有的Smart ControllerEX连接 |
| 随机附件 |
• XSYS电缆,
带跳线,
2m/6ft
(13323-000)
• 前面板套件
(90356-10358) |
• XSYS电缆,
带跳线,
2m/6ft
(13323-000)
• 前面板套件
(90356-10358)
• 电缆密封组件
(08765-000) |
• XSYS电缆,
带跳线,
2m/6ft
(13323-000)
• XSYS电缆,
5m/15ft
(11585-000)
• DB9分路器
(00411-000)
• 1394电缆,
5m/15ft
(13632-045)
• 连接到控制器的
eV+许可
(14529-103) |
• XSYS电缆,
带跳线,
2m/6ft
(13323-000)
• XSYS电缆,
5m/15ft
(11585-000)
• DB9分路器
(00411-000)
• 1394电缆,
5m/15ft
(13632-045)
• 连接到控制器的
eV+许可
(14529-103)
• 电缆密封组件
(08765-000) |
∗ 如需传送带跟踪,则需要增加Smart Controller EX控制器(19300-000),工控机及相关电缆。
| 产品名称 |
Hornet |
| |
尺寸 |
565 |
| 类型 |
3轴 |
4轴 |
| IP |
Standard |
IP65/67 |
Standard |
IP65/67 |
| 型号 |
1720□-45600 |
1720□-45610 |
1720□-45604 |
1720□-45614 |
| 安装 |
倒置式 |
| 工作范围 |
X、Y轴(行程) |
1130 mm |
| Z轴(行程) |
425 mm |
| 旋转轴(旋转角度) |
--- |
±360° |
| ***大有效载荷 |
8 kg |
3 kg |
| 重复精度 |
±0.10 mm |
连续节拍时间
(20°C测试环境) |
有效载荷0.1 kg |
0.32秒∗1 |
0.35秒∗1 |
| 有效载荷1.0 kg |
0.34秒∗1 |
0.37秒∗1 |
| 有效载荷3.0 kg |
0.38秒∗1 |
0.42秒∗1 |
| 电源要求 |
DC 24 V:6 A
AC 200~240 V:10 A,单相 |
| 防护等级 |
底座 |
机器人顶部 |
IP20 |
IP65 |
IP20 |
IP65 |
| 机器人底部 |
IP65 |
| 工作平台 |
IP67 |
| 环境要求 |
环境温度 |
1~40°C |
| 湿度范围 |
5~90%(无结露) |
| 重量 |
52 kg |
| 基本配置 |
控制器 |
eAIB |
| 板载I/O (输入/输出) |
12/8 |
| 传送带跟踪输入 |
2 |
| RS-232C串行通讯端口 |
1 |
| 编程环境 |
ACE、PackXpert、ePLC |
| ACE Sight |
有 |
| ePLC连接 |
有 |
| ePLC I/O |
有 |
| 可连接的控制器∗3 |
SmartController EX、NJ/NX/NY系列∗3 |
∗1. 标准节拍距离, mm (25/305/25)
∗2. 选择适合应用的控制器。
∗3. 与NX/NJ/NY系列连接,需要ACE软件版本2.3.C及以上。
了解更多OmRon产品详情,请点击关注:欧姆龙机器人
图文来源网络,侵删

 产品:16
产品:16
 联系我们
联系我们
